
Work @ Nexera Robotics


Overview
During my Co-op as a Robotics Test Engineer at Nexera Robotics, I am heavily involved in the physical R&D and hardware validation of advanced robotic end-effectors. My primary focus is on the testing and iterative development of a custom universal gripper, where I engineer testing protocols for various silicone membrane designs and pneumatic suction profiles to optimize handling for complex industrial applications.
Key Responsibilities
Universal Gripper R&D
Spearheaded the physical testing and iteration of a novel universal robotic gripper utilizing flexible silicone membranes.
Evaluated and documented failure modes for different membrane thicknesses and material profiles under live load conditions.
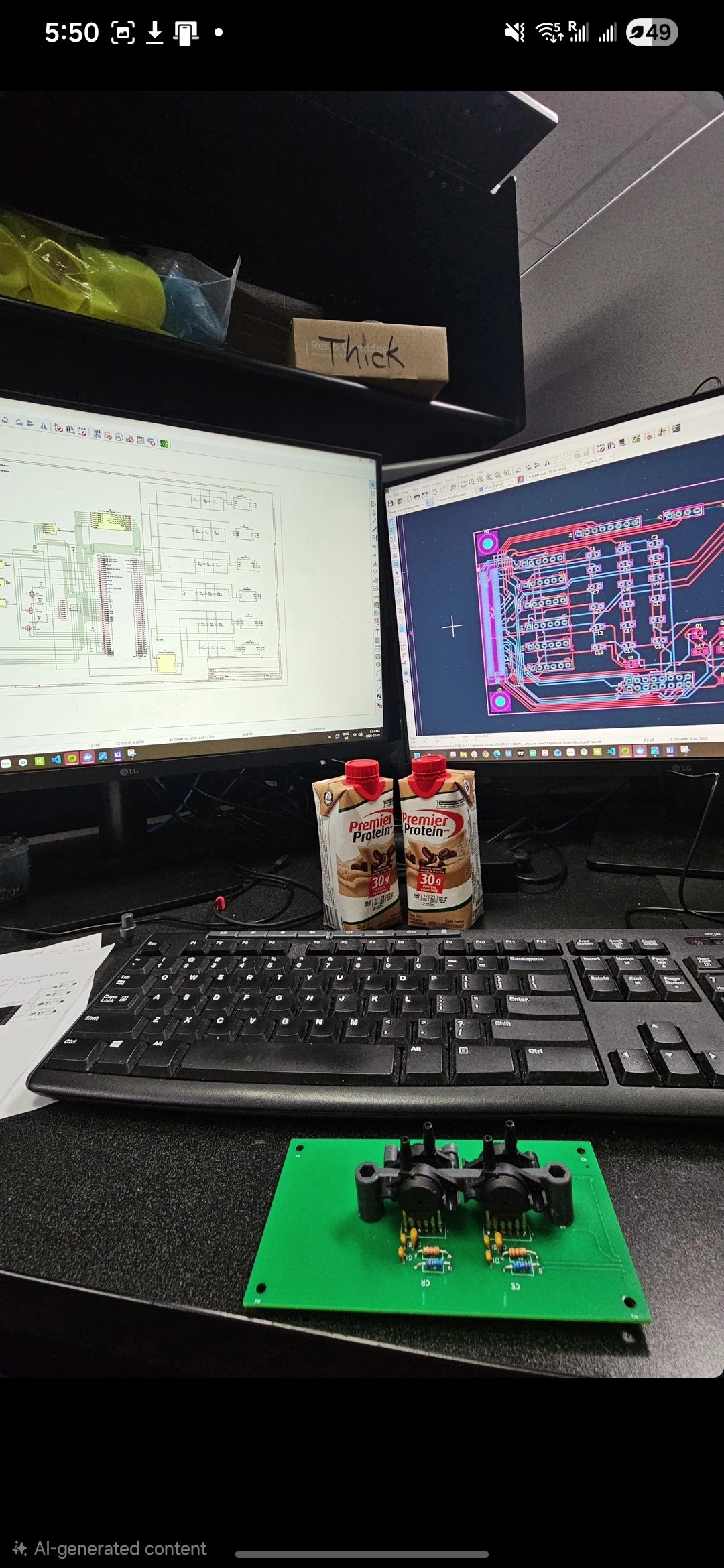
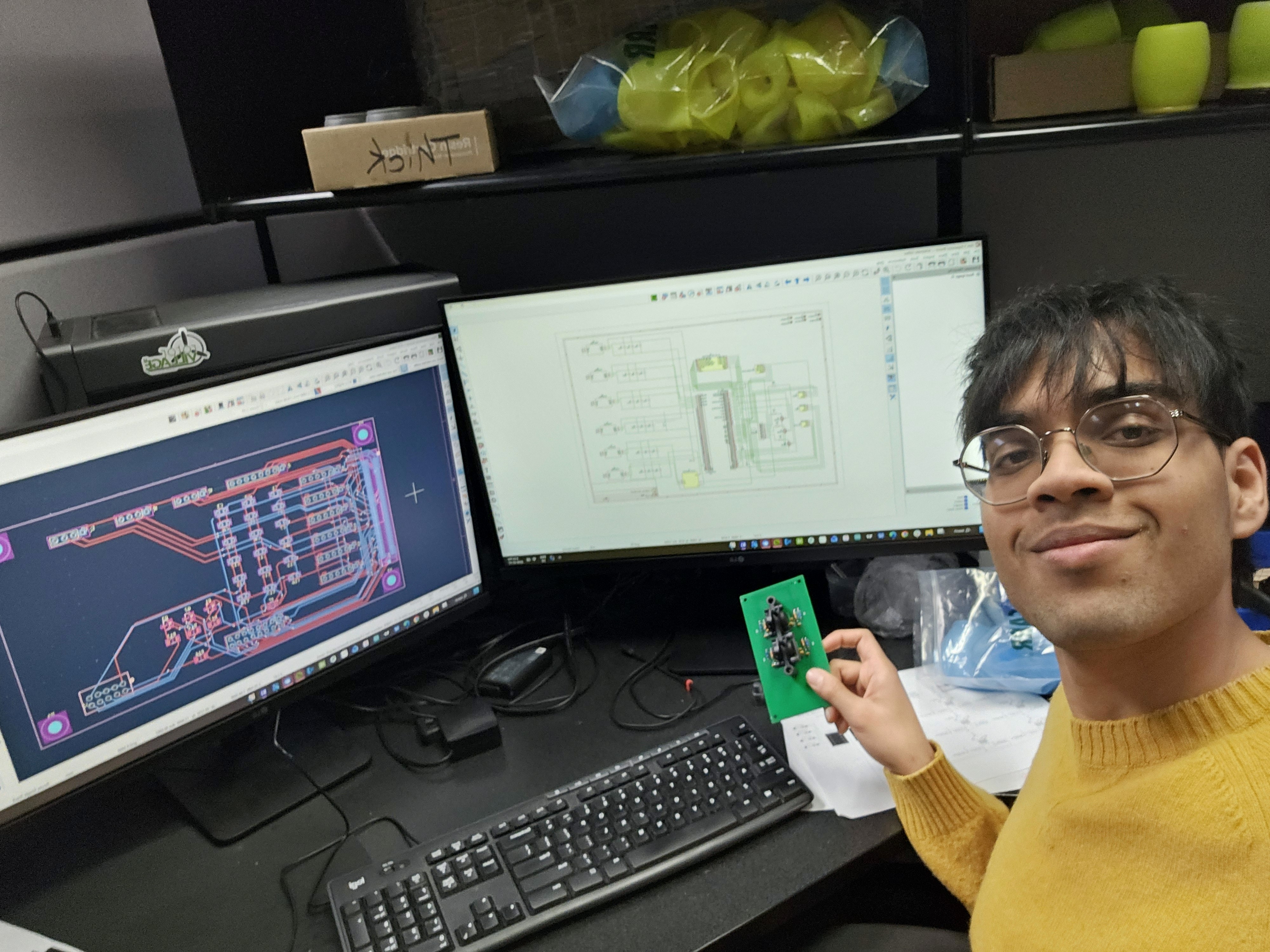
Custom PCB Design & Assembly
Designed custom PCB expansion boards, managing full schematic capture and board layout for advanced sensor integration.
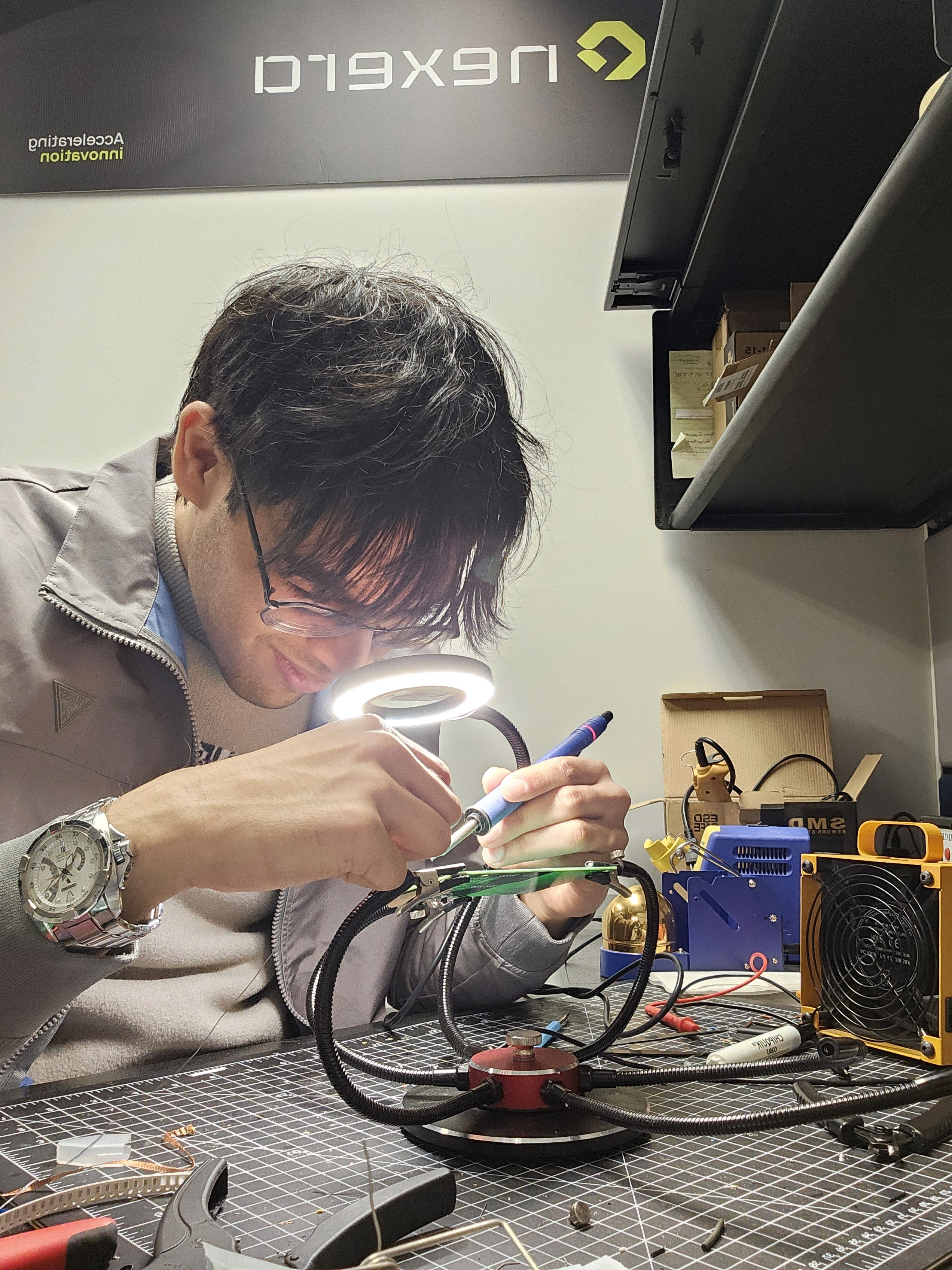
Executed high-precision Surface Mount Device (SMD) and through-hole soldering to assemble, debug, and validate functional prototype boards.
Pneumatic & Suction Testing
Designed and executed physical test protocols for various suction cup configurations to maximize payload reliability, grip strength, and vacuum seal integrity.
Validated pneumatic actuation timing and flow rates for real-world gripping cycles.
Mechanical Design & Rapid Prototyping
Utilized SolidWorks (CSWA Certified) to design modular test fixtures and modify gripper components for continuous physical validation.
Bridged mechanical design with physical hardware, ensuring 3D CAD models translated effectively into functional, testable prototypes.
Skills Gained (Updated)
Mechanical Design: SolidWorks (CSWA), rapid prototyping, modular test fixture design.
Electrical & PCB: Schematic capture, PCB layout, SMD & through-hole soldering, custom expansion boards.
Robotics & End-Effectors: Universal gripper R&D, payload validation, hardware integration.
Testing & Validation: Design of Experiments (DoE), failure analysis, empirical data collection.
Pneumatics & Materials: Vacuum systems, suction cup application, silicone membrane iteration.
